В конце прошлого года японский стартап по робототехнике GITAI отправил свою роботизированную руку S1 на Международную космическую станцию в рамках коммерческого модуля расширения воздушного шлюза, чтобы проверить некоторую полезную автономность в космосе. На МКС все движется довольно медленно, поэтому только в прошлом месяце астронавты NASA установили рычаг S1, и GITAI смог запустить систему в нужное русло – или, скорее, сидеть в удобных креслах на Земле и наблюдать, как рычаг выполняет большинство своих задач сам по себе, потому что это мечта, верно?
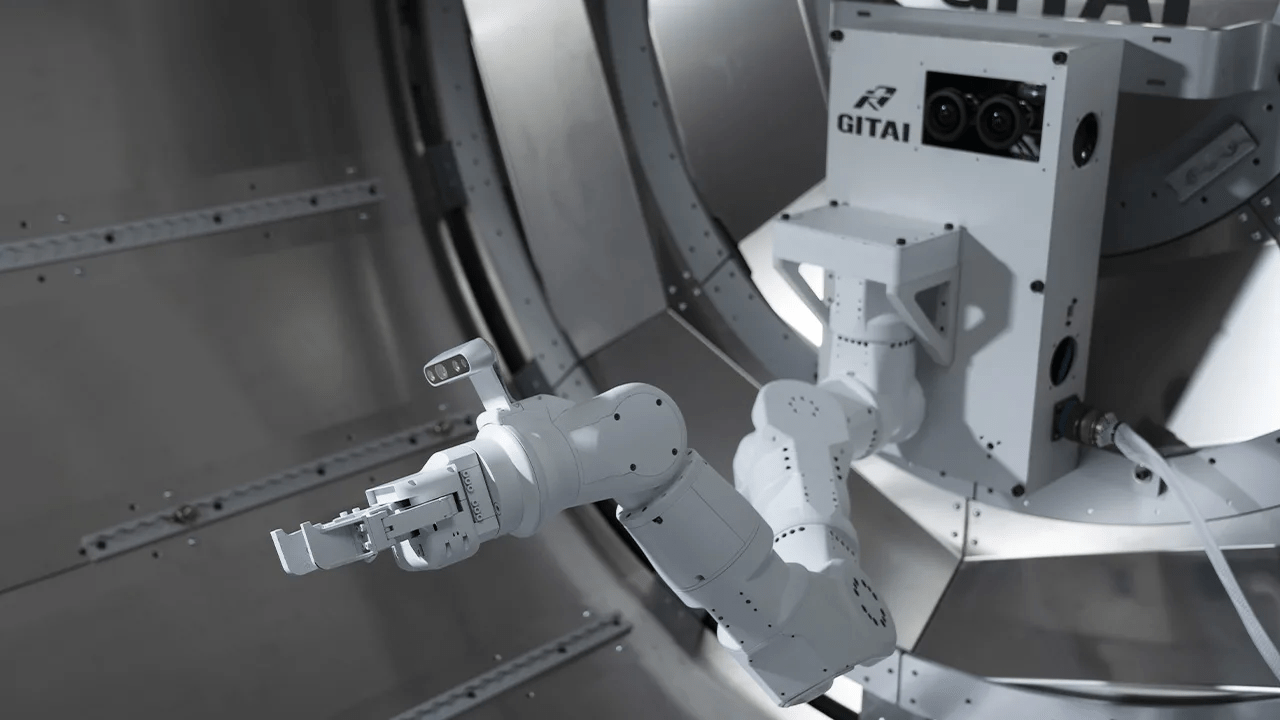
Хорошая новость заключается в том, что все прошло хорошо, и рука сделала все, на что надеялся GITAI. Итак, что же будет дальше с коммерческой автономной робототехникой в космосе? Генеральный директор GITAI рассказывает нам, над чем они работают.В ходе демонстрации этой технологии автономный космический робот GITAI S1 был установлен внутри шлюза МКС Nanoracks Bishop и успешно выполнил две задачи: сборку конструкций и панелей для сборки в космосе (ISA) и управление переключателями и кабелями для работы внутри транспортного средства (IVA).
Одним из преимуществ работы в космосе является то, что это высоко структурированная среда. Микрогравитация может быть несколько непредсказуемой, но у вас есть очень хорошее представление о характеристиках объектов (и даже освещения), потому что все, что там находится, чрезмерно четко определено. Таким образом, такие вещи, как использование двухпальцевого захвата для относительно высокоточных задач, вполне возможны, поскольку вариации, с которыми приходится сталкиваться системе, невелики. Конечно, все всегда может пойти не так, поэтому GITAI также протестировал процедуры телеоп из Хьюстона, чтобы убедиться, что присутствие людей в курсе также является эффективным способом выполнения задач.
Поскольку полная автономия значительно сложнее, чем почти полная автономия, случайный телеоп, вероятно, будет иметь решающее значение для космических роботов всех видов. Мы поговорили с генеральным директором GITAI Шо Наканосэ, чтобы узнать больше об их подходе.
IEEE Spectrum: Как вы думаете, какова правильная степень автономности для роботов, работающих внутри МКС?
Шо Наканосэ: Мы считаем, что сочетание 95% автономного управления и 5% удаленного суждения и удаленного управления является наиболее эффективным способом работы. В этой демонстрации МКС вся работа была выполнена с 99% автономным управлением и 1% удаленным принятием решений. Однако в реальных операциях на МКС будут возникать нерегулярные задачи, которые не могут быть решены с помощью автономного управления, и мы считаем, что такие нерегулярные задачи должны решаться дистанционным управлением с земли, поэтому мы считаем, что конечное соотношение примерно 5% дистанционного суждения и дистанционного управления будет наиболее эффективным.
GITAI применит технологию автономной космической робототехники общего назначения, ноу-хау и опыт, приобретенные в ходе этой технической демонстрации, для разработки внетранспортной робототехники (EVR), которая может выполнять задачи по стыковке, ремонту и техническому обслуживанию для обслуживания на Орбите (OOS) или проводить различные мероприятия по исследованию Луны и строительству лунной базы.
Шо Наканосэ
